
|
Plastic zwerfvuil op zee is een van de grootste milieuproblemen waarmee we vandaag worden geconfronteerd. Tonnen plastics komen in onze oceanen terecht en hebben een impact op de mariene biodiversiteit. Het probleem wordt al aangepakt door de SDG's van de VN en de EU-missie Starfish, en onlangs, op 3 maart 2022, werd een historische resolutie genaamd "End Plastic Pollution" aangenomen tijdens de 5e VN-milieuvergadering om een einde te maken aan plasticvervuiling en een internationale wettelijk bindende overeenkomst te smeden tegen 2024. Om de plasticvervuiling aan te pakken, moeten we eerst verduidelijken hoe en waar plastic werkelijk in de oceaan terechtkomt. De huidige veldbemonsteringen en modellen geven slechts een klein deel van het antwoord. Teledetectie met satellieten, drones en vaste camera's kan dit inzicht vergroten en manieren bieden om de geïmplementeerde regelgeving op te volgen. Ontdek hoe we onze expertise in oceaanoptica, spectrale beeldverwerking en AI combineren om individuele stukken macro-afval en accumulatiegebieden te detecteren en karakteriseren, inclusief een blik op de eerste resultaten. Blogverhaal door Els Knaeps |
Het gebruik van remote sensing technologieën voor het opsporen en karakteriseren van plastic zwerfvuil op zee is nog vrij nieuw. Hoewel de technologie al wordt gebruikt bij industriële sortering, is de toepassing in een mariene buitenomgeving veel complexer. Enkele jaren geleden zijn we begonnen met de eerste experimenten in een laboratoriumomgeving om eerst de spectrale reflectie van mariene plastics beter te karakteriseren. Dit gaf ons inzicht in de effecten van water, verwering en structuur van de kunststoffen. Dit was een essentiële eerste stap om algoritmen voor plastic detectie te ontwikkelen en de meest geschikte sensoren te selecteren voor gebruik in de buitenomgeving.
We hebben deze kennis gebruikt om beelden van zowel drones als vaste camera's te verwerken in meerdere mariene plasticopsporingsprojecten, bv. AIDMAP (ESA - The Discovery Campaign on Remote Sensing of Plastic Marine Litter) en PLUXIN. In deze onderzoeksprojecten richten wij ons op de detectie van gebieden waar plastic zich ophoopt en van afzonderlijke stukken plastic zwerfvuil in rivieren. Beide kunnen belangrijke informatie opleveren om inzicht te krijgen in het traject van zwerfvuil op zee, van bron tot zinken en om opruimacties te ondersteunen.

Zwerfvuilophopingen detecteren met drones
In onze laatste projecten hebben we ons geconcentreerd op de ontwikkeling van nieuwe, op remote sensing gebaseerde oplossingen om:
- zwerfvuilophopingen te detecteren,
- het te onderscheiden van zijn omgeving (water, zand, ...)
- het percentage kunststoffen in het accumulatiegebied te schatten
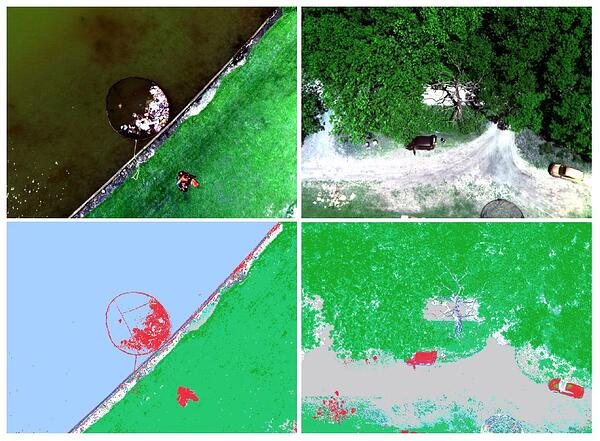
Enkele maanden geleden, in november 2021, hebben we een experiment uitgevoerd op het Sibelco-meer in België om zwerfvuilophopingen op te sporen met behulp van een drone uitgerust met een multispectrale camera en machine learning. We plaatsten zwerfvuilophopingen die kunstmatig waren gecreëerd met verweerde plastics uit de haven van Antwerpen en de Schelde, en aangespoelde plastics in Vietnam op zowel land- als wateroppervlakken. Het zwerfvuil bevatte kunststoffen, maar ook stukken hout en riet.
Hieronder zie je de kleurenbeelden van de drone boven water (linksboven) en land (rechtsboven), samen met de bijbehorende zwerfvuilkaarten op de onderste rij. De meest voorkomende materialen in deze beelden zijn strooisel (rood), hout (blauw), water (lichtblauw), bodem (grijs) en vegetatie (groen). Gearceerde pixels zijn gemaskeerd en verschijnen in het wit (transparant). De aanpak is volledig geautomatiseerd, zodat grote en ontoegankelijke gebieden in één keer kunnen worden gescreend.
Individuele zwerfvuildetectie en -karakterisering
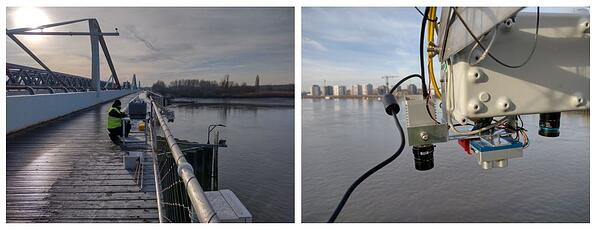
Om individueel zwerfvuil in waterwegen te monitoren en te karakteriseren, hebben we een systeem opgezet met vaste camera's gemonteerd op een brug om continue monitoring met zeer hoge ruimtelijke resolutie mogelijk te maken. De eerste experimenten gingen in 2021 van start en waren gericht op al het zwerfvuil dat aan het oppervlak of licht onder water drijft. In de komende maanden zullen we de algoritmen verder verbeteren om kunststoffen van ander zwerfvuil te onderscheiden.
We hebben tests uitgevoerd met verschillende soorten camera's: een traditionele RGB-camera, een multispectrale VNIR-camera en een multispectrale SWIR-camera. Alle camera's werden geïntegreerd in een behuizing die aan een brug werd bevestigd, waarbij alle camera's op dezelfde locatie op de rivier waren gericht. De SWIR-camera werd specifiek ontworpen voor de detectie van kunststoffen door Xenics, een Belgisch bedrijf met ervaring in het ontwerpen en produceren van infraroodsensoren. Tijdens de ontwikkeling hielden we rekening met de ideale golflengteselectie voor plasticdetectie die eerder tijdens het Hyper-project was gedefinieerd. De camera is ook compact en licht gehouden met het oog op extra setups met behulp van drones.
Geautomatiseerde verwerkingsketen op basis van AI
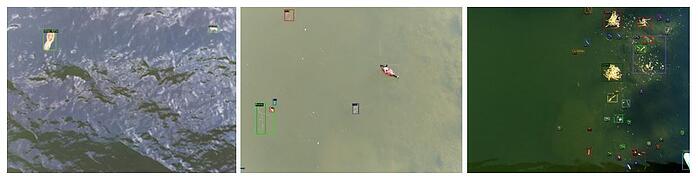
Om zwerfvuil te detecteren werken we met een AI-model dat is ontwikkeld voor het detecteren van uitschieters in de waterwegen, verfijnd op onze verzamelde trainings datasets. We zijn begonnen met de RGB-gegevens. Uit de eerste resultaten bleek dat zwerfvuil met hoge nauwkeurigheid kan worden gedetecteerd (de gemiddelde precisie 50 bedroeg 88,74 procent). Deze veelbelovende resultaten moedigden ons aan om dit AI-model ook te gebruiken voor andere datasets met verschillende soorten plastic en andere camerasystemen. Verschillende experimenten tonen aan dat licht ondergedompelde kunststoffen ook kunnen worden gedetecteerd, maar met een iets lagere nauwkeurigheid (moeilijker te onderscheiden) dan de drijvende kunststoffen. Toepassing van het bestaande AI-model op een nieuwe dataset (ander gebied, andere camera) leverde vergelijkbare nauwkeurigheden op.
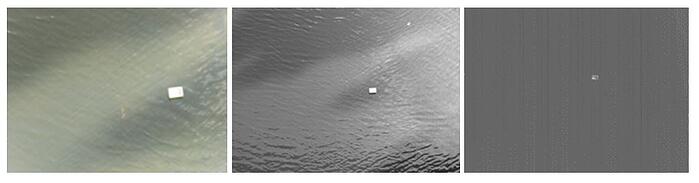
In de komende maanden zullen we de gegevensverwerkingsketen verder ontwikkelen. De volgende stappen omvatten de aanpassing van het AI-model aan de multispectrale VNIR- en SWIR-datasets. De figuur hieronder toont een plastic monster dat door de drie camera's in beeld is gebracht. Het is duidelijk dat de resolutie van de drie camera's verschilt, wat resulteert in een kleiner object in de SWIR-camera. Water absorbeert sterk in het SWIR, wat resulteert in een ruisachtige achtergrond, maar een potentieel hogere scheidbaarheid van het plastic object.
Haalbaarheid van een speciale satellietmissie?!
Gezien de uitdagingen bij het detecteren van plastic, heeft een geoptimaliseerde aanpak waarbij geavanceerde AI-technieken en een specifiek ontwerp worden gecombineerd, de grootste kans van slagen. Door van tevoren geschikte AI-technieken te identificeren, kunnen hun vereisten worden gebruikt als input voor de definitie van de missie. Daarom onderzoeken we ook de haalbaarheid van de ontwikkeling van een satellietmissie die specifiek gericht is op de opsporing van marien plastic (Marlise-project). Meer resultaten zullen later bekend worden gemaakt, dus blijf op de hoogte.
Bron: 2018-2022 VITO